To achieve the project objectives and test the proposed technologies for flexibility, efficiency and user acceptance, the project has 3 end users that will set the challenges, provide feedback through the development phase and assess the effectiveness of the solution, from 3 manufacturing sectors:
Discover our 3 Use Cases
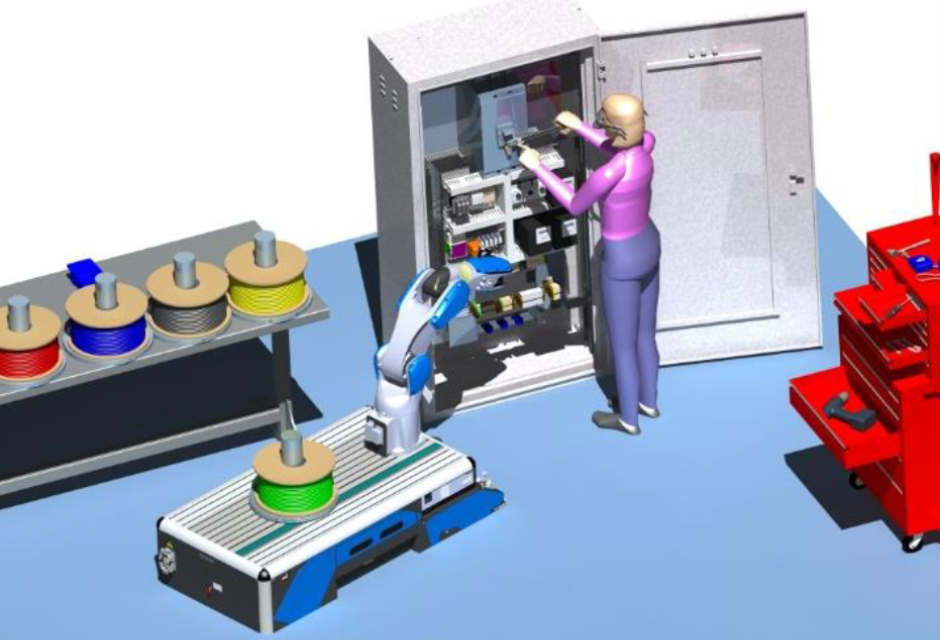

Current status: Lift Control Systems requires constant training and adaptation of assembly operations to match new requirements and provide high-quality products. The components are transported with forklifts to the assembly workstation, where operators manually assemble the cabinets and test them for potential errors. However, quality, productivity, health and safety, and environmental issues still occur, and the assembly procedure and intra-shopfloor logistics are not yet optimized. The current manual labor activities increase the overall time required for efficient production times and increase the total manufacturing costs.
MASTERLY solution: A hybrid human-robot collaborative shop floor to automate intra-shop floor logistics and assembly operations for the production of electrical cabinets used for lift control. An AGV with a collaborative armcollaborates with a human operator to perform logistics operations by autonomously picking and delivering components to the assembly station. The operator installs some components with the help of an AR solution, while the mobile robot assists with the installation of electrical components using vision and force control algorithms. A smart modular gripper with integrated AI decision-making adapts its shape automatically, and AI-based vision algorithms facilitate the detection of relevant parts.


Current status: The picking of products for order preparation is still done manually by the operators: they take the correct number of items for each order and place them in another container to complete the order. The instructions are received from a screen or tablet. This results in highly repetitive work where a lot of time is spent moving through the shelves. The work can sometimes be alienating, poorly ergonomic and low mental incentive for employees.
MASTERLY solution: An autonomous robotic system will pick up the containers and take them to a dedicated picking station for the preparation of the order boxes. The robotic cell will receive order instructions from DEC’s management system and perform picking and placing activities in the boxes containing the orders, with the identification of the products using the instructions and codes on the tablet. A vision system will inspect the objects to determine the correct gripping point and a flexible and reconfigurable gripper will be implemented.
The human will have new responsibilities and the system will provide simple, flexible and seamless integration with a fleet of AGVs.
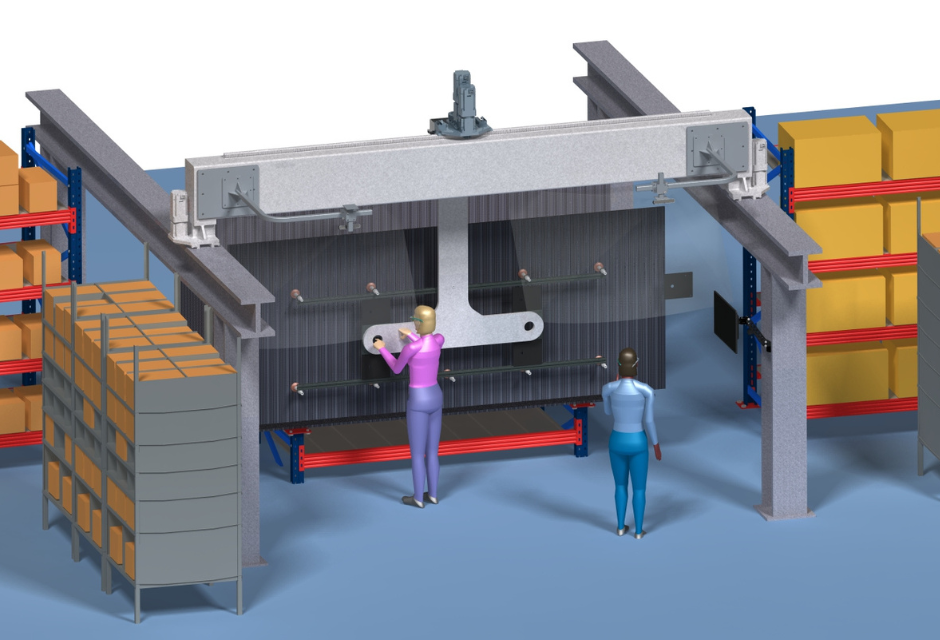

Current status: The assembly line of an aircraft center wing box involves several stations aided by an AGV and a robotic station, and the handling of the elements is performed using a bridge crane driven by operators. However, this operation is prone to swinging and could lead to damage to the components. A fine positioning of the elements is required to ensure the right match and avoid quality defects and errors in the assembly process. The fixtures used have an arch architecture and are formed by modular elements to adapt to different components, ensuring the quality of the final product.
MASTERLY solution: The production case will use a sensor network that will monitor the operations to reduce collisions and swinging, while an intelligent fixture with smart modules and metrology tools will enable fine positioning of the elements to be assembled, minimizing errors and deformation. The goal is to improve production rate, handling security, and final product quality.
Our Consortium