
MASTERLY USE CASES – KLEEMANN – FIRST YEAR UPDATE
- Posted by MasterlyAdmin
- On March 19, 2024
- 0 Comments
- #development, #EUproject, #partner, #usecase
The first year of our project has concluded, and in this brief interview, we share updates from the Decathlon use case.
Here are insights from our partner:
Can you provide an overview of the status of your use case, highlighting any major milestones or achievements that have been reached after 1 year of the project?
The KLEEMANN use-case within the MASTERLY project seeks to revolutionize assembly operations for electrical cabinets used in lift control systems. In its initial year, the project has made notable progress focusing on the enhancement of the productivity, quality and safety throughout the electrical cabinet production process. The core of the proposed solution lies in the implementation of hybrid human-robot collaborative shop floor. This setup includes AGVs equipped with collaborative arms for achieving seamless HRC, augmented reality (AR) interfaces for both robot control and operator assistance, and advanced AI-driven algorithms for robot perception, control and decision-making. These elements work synergistically to optimize intra-shop floor logistics and assembly operations.
The main milestones achieved are:
AI Object Identification: Implementation of 6D pose estimation vision system based on CAD files of the components for the assembly of the electrical cabinet.
Force Driven Manipulation Controller: Experimentation with din-rail assembly by incorporating a force control mechanism for the robot to be able to handle delicately the parts.

Dynamic Digital Twin: Development of dynamic central point Digital Twin where different modules share data, ensuring seamless Human-Robot Collaboration (HRC) and efficient assembly.
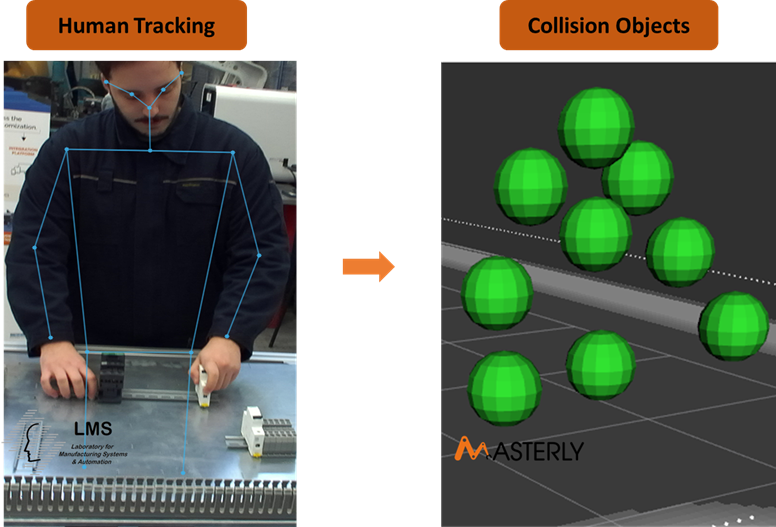
Human Perception: Implementation of human perception system to ensure operator safety during the collaboration with the AGV.
Dynamic Task and Actions Planning Allocation: Development of a software module capable of extracting useful information from the CAD files in order to establish a planning input and task allocation.
AR-Based Human Operator Support and Robot Control: Implementation of an AR application for human operator assistance and robot control via the use of interactive planners and ROS2 communication.

Robot Programming: Development of motion-primitives approach integrated with ROS2 framework for trajectory planning and collision avoidance.
Find out more about the KLEEMANN use case https://www.masterly-project.eu/use-cases/
